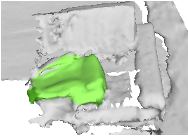
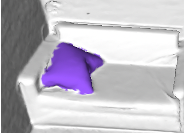
Novel Catgory Segmentation
|
Backpack
|
Keyboard
|
Pillow
|
Ladder
|


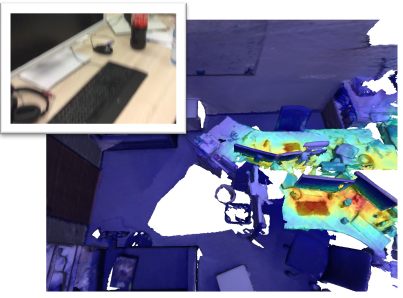
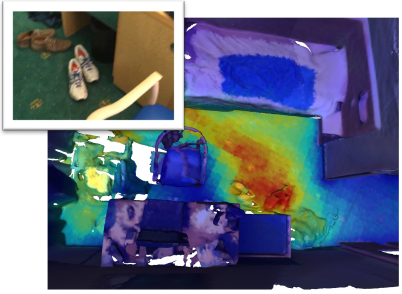
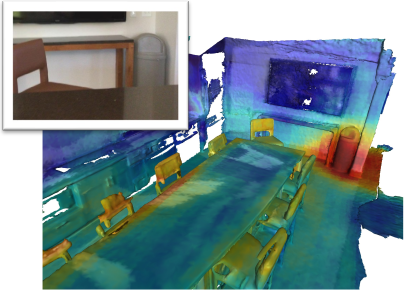
Novel Catgory Heatmap
|
paper
|
Keyboard
|
shoes
|
Trash Can
|

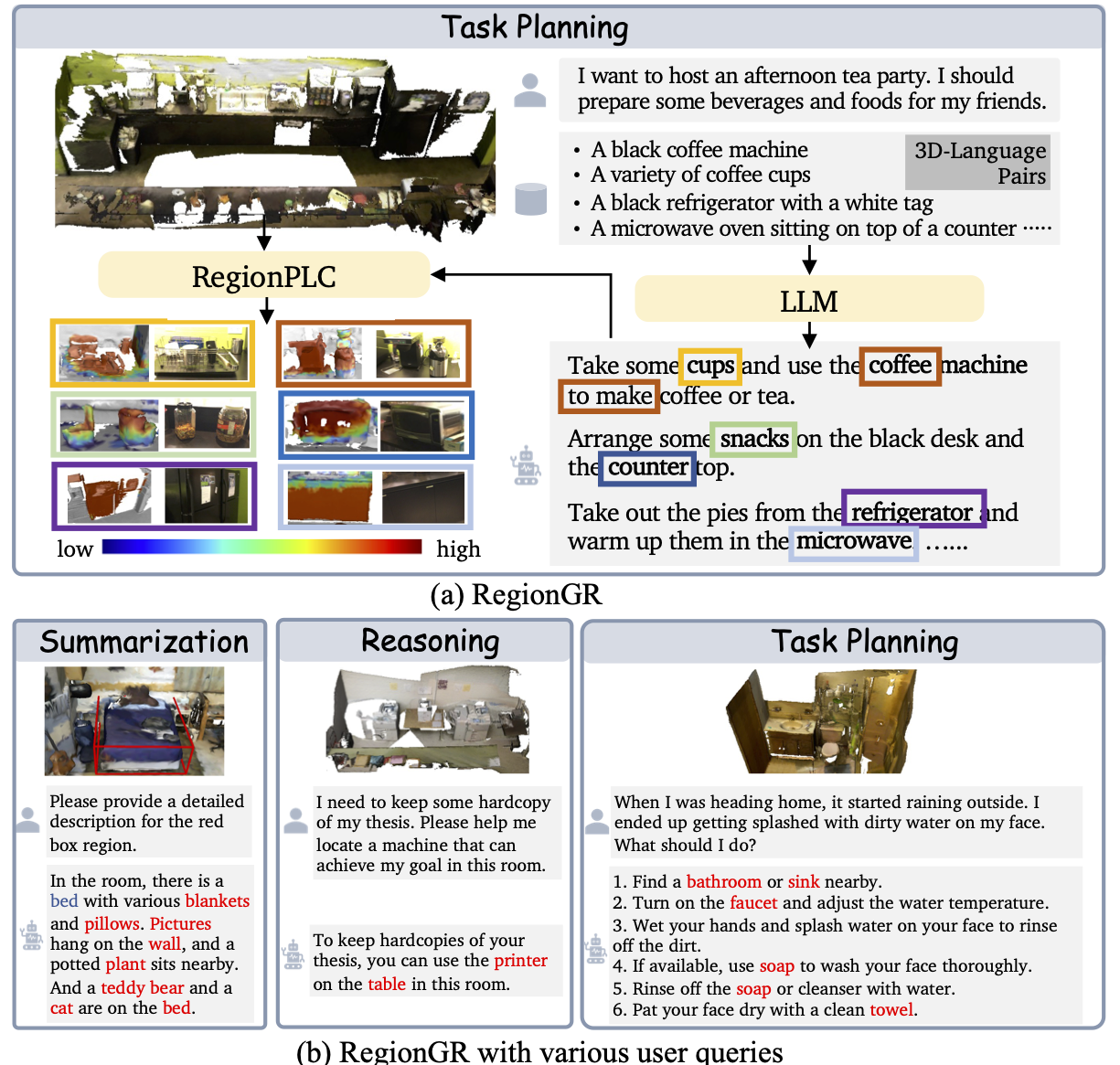
Grounded 3D Reasoning